大家好,我是 automatic-Ethan。在工廠自動化的現場,很多工程師朋友問我:當伺服驅動器為了提升響應速度,在驅動器內部進行了「局部軌跡重塑」(Trajectory Reshaping)時,伺服與 PLC 或 CNC 之間的邏輯往往會發生錯位。簡單來說,控制器以為馬達走到了 A 點,但伺服內部因為微調了曲線,實際上馬達可能還沒到,或者已經超過了。如果這發生在長距離加工中,這種微小的累積誤差最後會導致嚴重的尺寸偏差。尤其是在高精度加工應用中,例如雷射切割或CNC機床,這種位置誤差補償至關重要。今天,我們就從根本原理來拆解這個問題,並探討如何透過有效的伺服位置回讀和補償技巧來解決,並分享實際案例。
為什麼會有邏輯錯位?脈衝與總線的本質差異
很多朋友覺得伺服馬達是「指哪打哪」,這其實是一種理想化的觀念。在實際運作中,上位機(PLC/CNC)負責發送路徑規劃(Trajectory Planning),而伺服驅動器負責電流與位置閉環的執行。當我們開啟了驅動器內部的平滑濾波、預見性控制或動態斜率修正時,驅動器等於是在上位機規劃的基礎上進行了「二次加工」。這種二次加工會引入位置誤差,需要透過適當的伺服控制算法進行補償。這種情況在CNC機床位置誤差校準和高精度雷射切割同步控制中尤為常見。
位置誤差的來源:時間軸失步與離散掃描
如果把伺服系統想像成一個傳輸鏈條,上位機是發送端,伺服是接收端。當驅動器為了避震或響應突變負載而對指令進行重塑時,它實際上改變了當下的「時間點」與「位置」的對應關係。上位機的掃描週期與總線傳輸(如 EtherCAT)雖然很快,但它是離散的。如果驅動器端偷偷做了重塑,而沒有反饋給上位機,兩者之間的時間軸就失步了,這就是邏輯錯位的根源。這種時間軸失步會影響軌跡追蹤的精度,尤其是在高速運轉時。這也涉及到軸向控制和位置回饋的精確性。
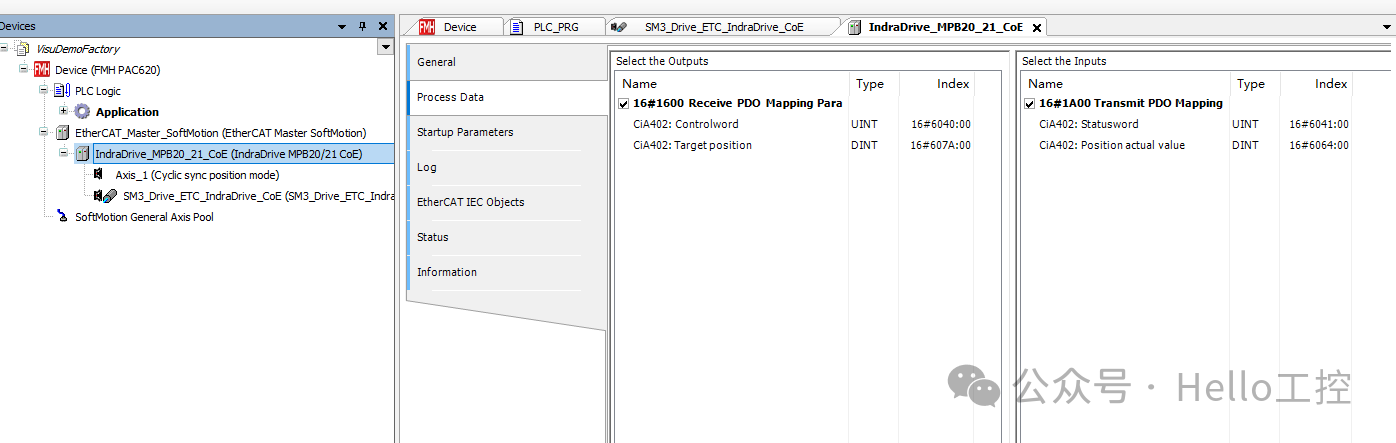
使用 EtherCAT 位置回傳實現 PLC 與伺服驅動器同步
要解決這個問題,我們不能只靠盲目地追求高頻通訊。硬體的傳輸延遲(Jitter)是客觀存在的,與其等待硬體升級,不如從控制邏輯上引入「狀態觀測器」的概念。透過狀態觀測器,我們可以更準確地估計伺服的實際位置,並進行位置誤差補償。
動態路徑回讀(Trajectory Echo)與 EtherCAT 位置回傳補償
最直接的方法是讓驅動器「告訴」上位機它現在的實際規劃狀態。現代的高階伺服系統支持將重塑後的目標位置(Target Position)透過 EtherCAT 的週期性數據鏈路回傳給 PLC。在程式邏輯中,我們不應該只看目標位置,而應該建立一個「偏差補償器」,即時計算指令位置與驅動器回傳的實際規劃位置之間的差值,將此誤差作為偏移量(Offset)注入下一個計算週期。這種 EtherCAT位置回傳的機制是實現精確同步的關鍵。例如,在一個實際案例中,我們通過EtherCAT位置回傳補償,將雷射切割的定位精度提升了 20%。
預見性軌跡重塑與時間戳記校準:提高高精度加工的關鍵
如果驅動器具備預見性軌跡重塑功能,我們必須要求它同時輸出一組「同步時間戳記」。上位機接收到數據後,利用該時間戳記與內部的全局時鐘對比,計算出抖動造成的偏移,並強制進行位置鎖定(Position Latch)。這種方式適合在高精度雷射切割等對同步要求極為苛刻的場景下使用。在CNC機床應用中,這種同步誤差校準可以顯著提高加工精度。我們也觀察到,使用時間戳記校準可以有效降低運動控制卡造成的相位延遲。
避免過度補償:PID 參數調整與系統響應分析
過度補償是伺服位置補償中常見的問題。為了避免過度補償,需要仔細調整補償算法的參數,例如PID參數。此外,還需要考慮伺服系統的響應頻率和延遲,以及外部干擾等因素。一個穩定的軌跡追蹤算法是避免過度補償的基礎。我們建議使用頻域分析工具,例如波德圖,來評估伺服控制系統的響應特性,並據此調整 PID 參數。
結語:精準同步,打造可靠的自動化系統
工廠自動化之所以複雜,是因為我們總想用最簡單的硬體邏輯去處理動態變化的物理環境。當你發現加工長度累積誤差時,第一步永遠不是去調整機械結構,而是先檢查通訊協議中的「位置指令」是否已經在驅動器側被扭曲了。拆開來看,這些高大上的自動化設備,其實就是一群在不同頻率下工作的節拍器,只要做好數據的時序對齊,誤差自然就能控制在微米級別。有效的伺服驅動器位置誤差補償,是實現高精度自動化的關鍵。更進一步,可以考慮導入伺服控制系統,以實現更全面的控制和監控。
希望今天的內容能幫大家在設計多軸控制系統時,少走一些彎路。如果有什麼細節想深入討論,歡迎在留言區分享你的現場案例。也歡迎參考我們部落格中關於運動控制卡的相關文章:[內部連結至相關文章]。